Em vez de viajar, resolvi ficar e trabalhar na minha RepRap. Nada como alguns dias sossegado para conseguir resultados, vamos lá...
Já tinha mostrado uma versão de isopor, pois bem, a fadinha do RepRap passou aqui e transformou em MDF!
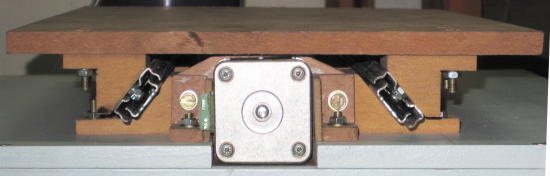
Segundo a sugestão do Viola, fiz a fixação pela lateral e por fora para simplificar e não embutido como tinha pensado originalmente.
A estrutura é toda feita com o mesmo MDF de 9mm, para facilitar a fabricação a Laser. Com estrutura tipo caixa em todas as peças ficou realmente bem rígido.
 |
| (click para ampliar) |
|
A gaveta para a eletrônica tem se revelado realmente muito prática! Instalei o driver da GLB, o que proporcionou
maior velocidade que com o Linistepper, algo como 8kHz, dá para movimentar os 30cm da mesa em 7 segundos, são
40mm/s.
Porém existe alguma
vibração em velocidades extremamente baixas. Usando ½ passo a vibração desaparece mas a veliciade cai...
Fiz uma pequena placa com o circuito do
JoyStick analógico. Incluindo comutação direto/manual e sensores de margem.
Isso facilita muito desenvolvimento e teste da mecânica e dos drivers porque fica fácil
movimentar em qualquer velocidade.
Nada como uma Laminadora dupla-face!
Este é o guia para os cabos da mesa aquecida. fica encaixado logo abaixo da mesa.
Dois bloquinhos mantém as pontas do flat pressionados, isso garante que ele se mantem no lugar acompanhando a guia de PVC.
Odeio fios embaralhados!!
Na traseira tem uma
extensão USB que vai até o interior da gaveta.
Como destina-se primariamente a uma RepRap, deveria ser a única conexão. No caso de usar o
EMC2 ainda terei que resolver, mas talvez não seja possível tantas voltas.
Sensor de
Fim de Curso. Tem gente que não gosta, mas o software da RepRap gosta, então é importante.
Acho que um micro-switch é a coisa mais simples e mais prática, além de que o bloco onde está fixado serve de limitador também.
Eu pessoalmente gosto dos sensores de limites, e já deu para perceber que o motor tem
força suficiente para
arrancar o acoplamento se acionado até o fim em velocidade.
- Melhoria no Acoplamento do Motor
Não estava conseguindo fazer um bom acoplamento
entre o Motor e a Barra Roscada. O motor tem 5mm, a mangueira de borracha (de combustível) tem 5mm nominal, e a barra roscada tem 6,4mm (1/4"). A rosca entra forçando (rosqueando) e mesmo após muitas tentativas não consegui alinhar.
Então o negócio é mudar o encaixe da rosca, mas mantendo a filosofia de fazer só coisas que não demandem ferramentas especiais. Usei uma lima, um rolamento de skate e uma furadeira:
Primeiro fixei o rolamento à barra. É mais difícil que parece porque não são do mesmo diâmetro! Usei 3 camadas de papelão bem apertadas sobre a rosca, após algumas tentativas achei a maneira certa de fazer...
Antes de continuar, verifique se está bem centralizado. Fixe a outra ponta da rosca na furadeira e segurando o rolamento apoiado sobre a mesa, verifique se está bem centralizado. Quando conseguir o alinhamento, aperte bem.
Agora o rolamento está preso na morsa, entre duas madeiras para não estragá-lo, e a furadeira apoiada na mesa.
Usando a furadeira em uma rotação que não produza muita vibração, ficou fácil limar a ponta (15mm) da rosca até alcançar um diâmetro pouca acima de 5mm.
Depois de montado já ficou muito bom, agora é possível fazer o ajuste e ficou realmente muito melhor.
Veja na foto do Fim de Curso acima a ponta da rosca entrando na borracha
Novo: esta foto deve dar uma idéia melhor da montagem para limar a Barra Roscada.
A barra tem que ficar presa no mandril com o mínimo de vibração.
Agora quem quiser ver ao vivo e a cores (mesmo que tenham falado mal do meu azul claro...) só no sábado que vem no Medino! Espero vê-los todos lá...