- Driver do Stepper da Extruder, usando o mesmo circuito do Driver GLB, ficou mais fácil porque eles fornecem o chip avulso.
- Saídas para vários coolers, um que liga junto com o enable do motor, e dois outros: um para esfriar o bico e outro para esfriar a mesa ao final da impressão
- sensor de altura da mesa, como o o Z-probe do Nophead, mas com solenóide para acionamento automático
- Saída para acionador de uma Spindle/Dremmel (para usar como CNC) com sensor de altura da ferramenta.
- Saída Relê para acionar a fonte de alimentação.
Esta placa faz parte do protótipo de uma placa que pretendo fazer (espero que com ajuda...). Então tem alguns circuitos extra e provavelmente vão faltar coisas...
Esta configuração é especial para usar em uma CNC já existente. A idéia é construir uma placa única que acione o Extruder diretamente e tenha as saídas para a CNC exatamente como uma Paralela de PC, compatível com TurboCNC/Mach3/EMC2...

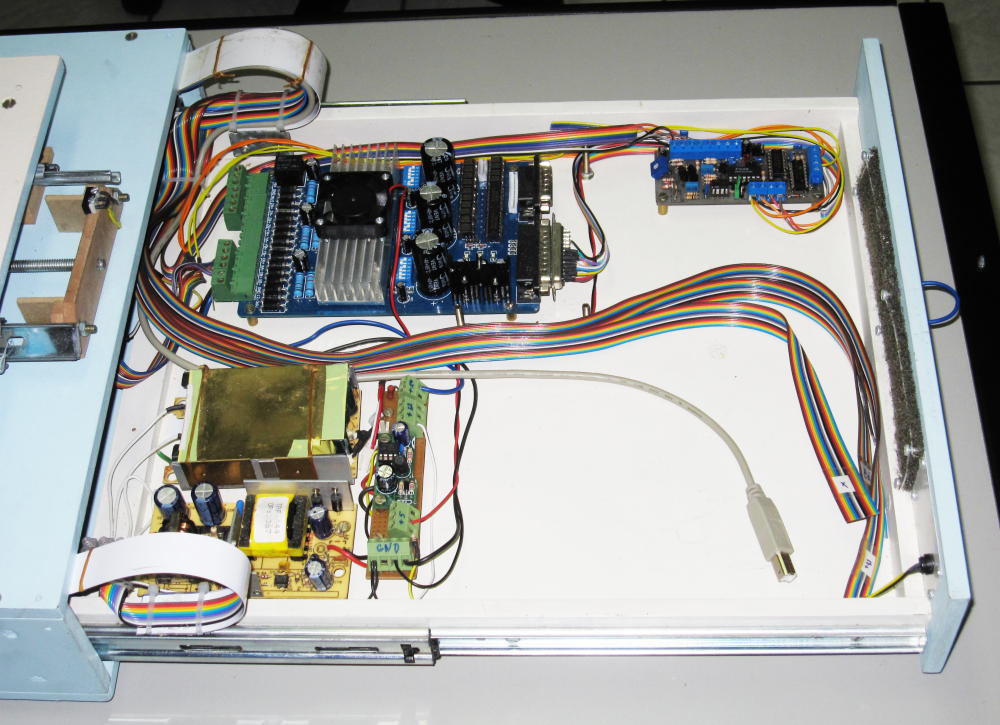
No meio da placa está o chip Toshiba TB6560AHQ, o dissipador é maior que o necessário mas não tem como fazer um menor...
O Flat Cinza vem direto do ArduinoMega rodando Marlin.
O Flat Colorido vai direto até o Extruder.
Os fios são duplicados, mesmo assim acrescentou 0,5 Ohms por bobina. Como o driver é mais flexível, se necessário posso alimentar com 24 Volts.

O chip TB6560AHQ já faz tudo, os detalhes eu copiei direto do driver da GLB, até nomeei os jumpers pelas chavinhas da placa para facilitar.
(o "decay" está fixo em "fast", o que é bom para 1/2 passo)
(o "decay" está fixo em "fast", o que é bom para 1/2 passo)
Hesitei muito tempo resolvendo se deveria usar o driver L298/L297, como esses chips têm maior disponibilidade no nosso mercado. Ainda farei uma versão da placa com eles para testes.

Mas ainda há muito trabalho com o Firmware...
* Configuração das rampas de aceleração
* Bug no look-ahead (desliguei)
* Dá para ouvir alguns steps extra no final dos movimentos, isso está gerando uma parada extra